O ZL9NSQ é um Chip sensor de atitude 3D, de alto desempenho, que integra um acelerómetro de três eixos, um giroscópio de três eixos e um magnetómetro de três eixos. Com um microprocessador ARM Cortex-M4F de 32 bits, utiliza o algoritmo IMU Motion Engine juntamente com um transceptor sem fios de 2,4G e uma antena integrada. Algoritmos avançados de processamento de sinal gerem os dados de sensores amostrados em alta velocidade para fornecer quaterniões precisos e fiáveis, ângulos de Euler, acelerações calibradas e velocidades angulares calibradas, proporcionando informações de atitude tridimensional precisas.
Com uma gama de tensão de funcionamento versátil de 5V através de USB Tipo-C ou 3,3V/5V através de P2-PH2.0/P4-VCC, e suportando múltiplos métodos de comunicação, incluindo RF, UART e SPI, este módulo (com um ZL9NSQ) garante uma integração perfeita em vários sistemas. Ele alcança uma precisão estática de pitch/roll de 0,05° e oferece uma taxa máxima de saída de dados de 250Hz, sendo ideal para aplicações como monitorização de postura, equipamentos de jogos e entretenimento, navegação inercial, saúde e fitness pessoal.
✅ IMU de Alto Desempenho e Alta Precisão:
O ZL9NSQ integra um acelerómetro de três eixos, giroscópio de três eixos e magnetómetro de três eixos para fornecer informações de atitude tridimensional completas e precisas.
✅ Métodos Avançados de Comunicação
Suportando métodos de comunicação RF (Bluetooth), UART e SPI, o ZL9NSQ permite transmissão de dados versátil e integração em vários sistemas.
✅ Informação de Atitude Precisa:
O módulo sensor fornece dados precisos de quaterniões, ângulos de Euler, aceleração e velocidade angular, essenciais para aplicações de alta precisão.
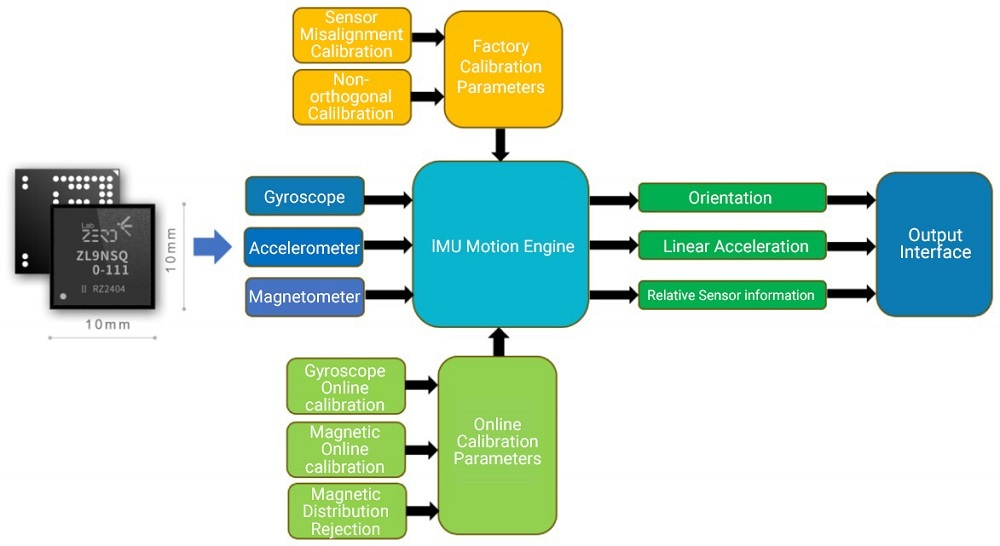
✅ Algoritmo Integrado IMU Motion Engine:
O software IMU Motion Engine oferece um conjunto completo de algoritmos de fusão de dados compostos, incluindo solução de atitude, julgamento de interferências e calibração online. Isso permite que os utilizadores obtenham facilmente informações de atitude 3D sem a necessidade de programação extensiva.
CARACTERÍSTICAS
◾ IMU de alto desempenho e alta precisão.
◾ Acelerómetro de três eixos integrado, giroscópio de três eixos, magnetómetro de três eixos.
◾ 3 métodos de comunicação: RF, UART, SPI.
◾ Pode fornecer quaterniões, ângulo de Euler, aceleração, velocidade angular e outras informações de atitude tridimensional.
APLICAÇÕES
◾ Monitorização de postura
◾ Equipamentos de jogos e entretenimento
◾ Saúde e fitness pessoal
◾ Navegação inercial
ESPECIFICAÇÕES
◾ Gerais:
- Tensão de funcionamento
· J1-USB Tipo-C: 5V
· P2-PH2.0: 3,3V
· P4-VCC: 5V
- Método de comunicação
· RF (Bluetooth)
· UART
· SPI
- Precisão de pitch/roll
· Estático: 0,05°
· Dinâmico: 0,1°
- Erro de precisão de direção (assistido por magnetómetro): 0,5°
- Erro de direção relativa
· Estático: <1°/hora
· Dinâmico: 5°/hora
- Resolução de ângulo: <0,01°
- Repetibilidade de ângulo: <0,1°
- Taxa de saída de dados
· Dados brutos do sensor: Máx 250Hz
· Dados de navegação: Máx 250Hz
◾ Parâmetros do Acelerómetro
- Gama: ±16g
- Estabilidade de bias zero: 2mg
- Valor inicial zero: 40mg
- Erro de fator de escala: ±0,06%
- Não linearidade: ±0,1%
- Erro de alinhamento de eixo: ±0,05°
- Densidade de ruído: 75ug/√Hz
- Largura de banda: 260Hz
◾ Parâmetros do Giroscópio
- Gama: ±2000°/s
- Estabilidade de bias: 5°/hora
- Valor inicial zero: 0,2°/s
- Erro de fator de escala: ±0,05%
- Não linearidade: ±0,1%
- Erro de alinhamento de eixo: ±0,05°
- Densidade de ruído: 0,0028°/s/√Hz
- Largura de banda: 256Hz
◾ Parâmetros do Magnetómetro
- Gama: ±4900uT
- Estabilidade de bias: 20nT
- Erro de fator de escala: ±0,09%
- Não linearidade: ±0,3%
- Erro de alinhamento de eixo: ±0,05°
- Densidade de ruído: 0,14nT/√Hz
- Largura de banda: 200Hz
CONTEÚDO DA EMBALAGEM:
- Módulo Sensor de Atitude 3D Sem Fios ZL9NSQ
- Duas barras de pinos 2.54-10Pin
▶ Module product manual (PDF)
▶ Chip datasheet (PDF)
▶ SDK (.rar)